Menu
≡
╳
- Home
-
All Books
- Advance Surveying and Levelling By Rangwala
- Airport Engineering By Rangwala
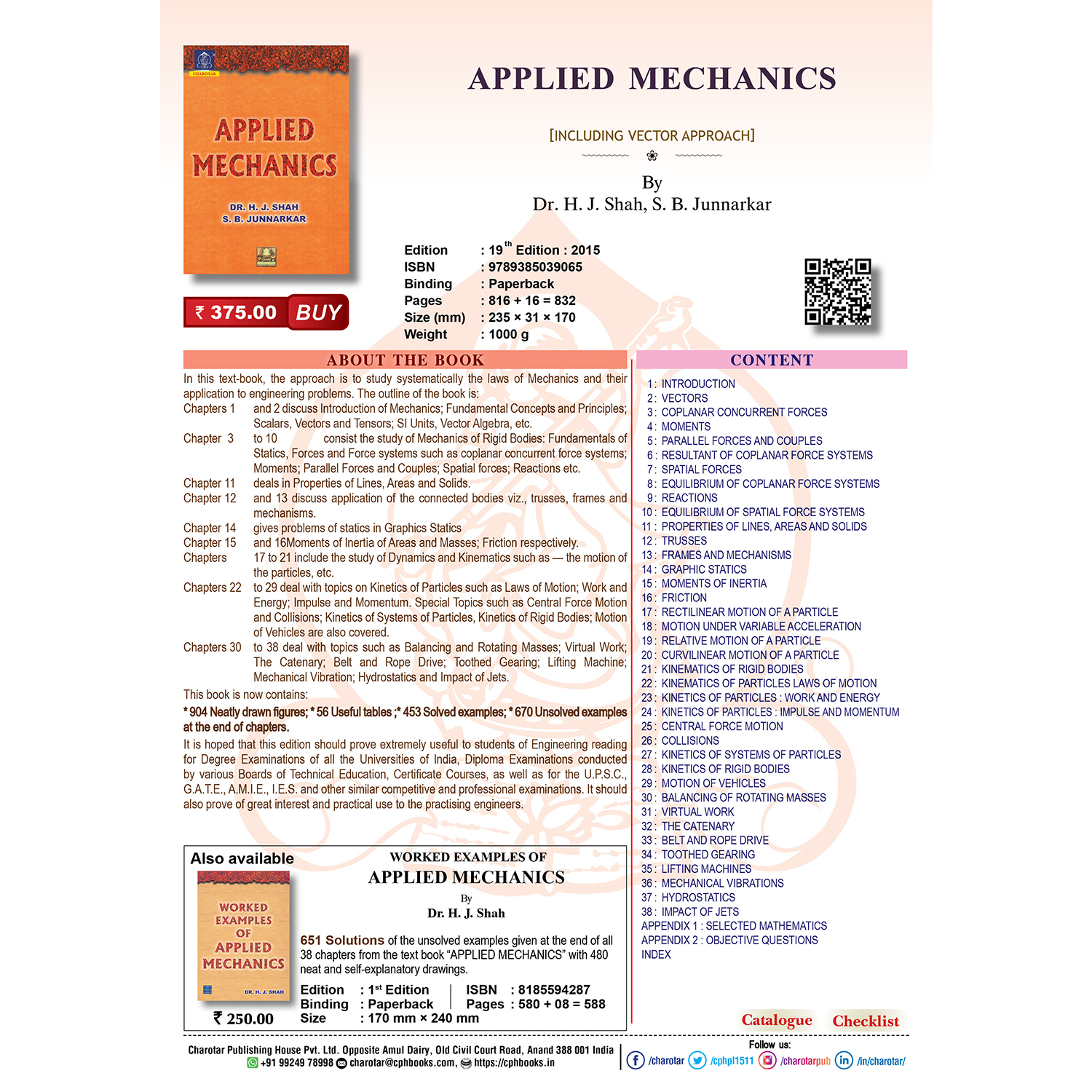
- Applied Mechanics By S. B. Junnarkar, Dr. H. J. Shah
- Basic Surveying and Levelling By Rangwala
- Bridge Engineering By J. S. Alagia
- Bridge Engineering By Rangwala
- Building Construction By Rangwala
- Building Planning and Drawing By Dr. N. Kumara Swamy, A. Kameswara Rao
- Civil Engineering Drawing By Rangwala
- CNC Fundamentals and Programming By P. M. Agrawal, Dr. V. J. Patel
- Concrete Technology By Dr. R. P. Rethaliya
- Construction of Structures and Management of Works By Rangwala
- Construction Planning and Management By Ketki B Dalal Rangwala
- Dock and Harbour Engineering By Hasmukh P. Oza, Gautam H. Oza
- Elements of Civil Engineering By Anurag Kandya
- Engineering Drawing By N. D. Bhatt
- Engineering Materials By Rangwala
- Essentials of Civil Engineering By Ketki Rangwala Dalal
- Estimating, Costing and Valuation By Rangwala
- Experiments in Mechanics of Solids By B. M. Raval
- Fluid Mechanics and Machinery Laboratory Manual By Dr. N. Kumara Swamy
- Fluid Power Transmission and Control By A. Alavudeen, K. H. Syed, N. Shanmugam
- Fundamentals of Programming with Fortran 77 By Dr. N. D. Jotwani
- Geometrical and Machine Drawing By N. D. Bhatt
- Geotechnical and Foundation Engineering By Dr. A. K. Verma, Rahul Verma
- Harbour, Dock and Tunnel Engineering By R. Srinivasan
- Highway Engineering By Rangwala
- Irrigation Engineering By Dr. N. P. Singh, T. Banerjee, M. J. Dholawala
- Logarithms and Other Tables By Dr. N. C. Pandya, Dr. C. S. Shah
- Machine Design By Dr. N. C. Pandya, Dr. C. S. Shah
- Machine Drawing By N. D. Bhatt
- Matrix Methods of Structural Analysis By Dr. A. S. Meghre, S. K. Deshmukh
- Mechanics of Solids By Dr. H. J. Shah
- Mechanics of Structures Vol. I By Dr. H. J. Shah, S. B. Junnarkar
- Mechanics of Structures Vol. II By Dr. H. J. Shah, S. B. Junnarkar
- Principles of Electrical Engineering By A. B. Shinde
- Production Technology Vol. I By K. G. Aswani
- Product Design and Value Engineering By Dr. M. A. Bulsara, Dr. H. R. Thakkar
- Programming in C By Jignesh Shah
- Programming In C (Gujarati) By Jignesh Shah
- Railway, Bridge and Tunnel Engineering By Rangwala
- Railway Engineering By Rangwala
- Reinforced Concrete Vol. I By Dr. H. J. Shah
- Reinforced Concrete Vol. II By Dr. H. J. Shah
- Soil Mechanics and Foundation Engineering By Hasmukh P. Oza, Gautam H. Oza
- Steam Tables By Dr. N. C. Pandya
- Structures In Practice By Gautam H. Oza
- Thermal Engineering By Dr. S. S. Khandare
- Town Planning By Rangwala
- Understanding Concept of Structural Analysis and Design By Janak P. Parikh
- Valuation of Real Properties By Rangwala
- Water Supply and Sanitary Engineering By Rangwala
- Worked Example of Applied Mechanics By Dr. H. J. Shah
- Our Distributors
- Download
- Contact
- About
-


Reviews
There are no reviews yet.