Mechanics of Solids By Dr. H. J. Shah
Original price was: ₹500.00.₹375.00Current price is: ₹375.00.
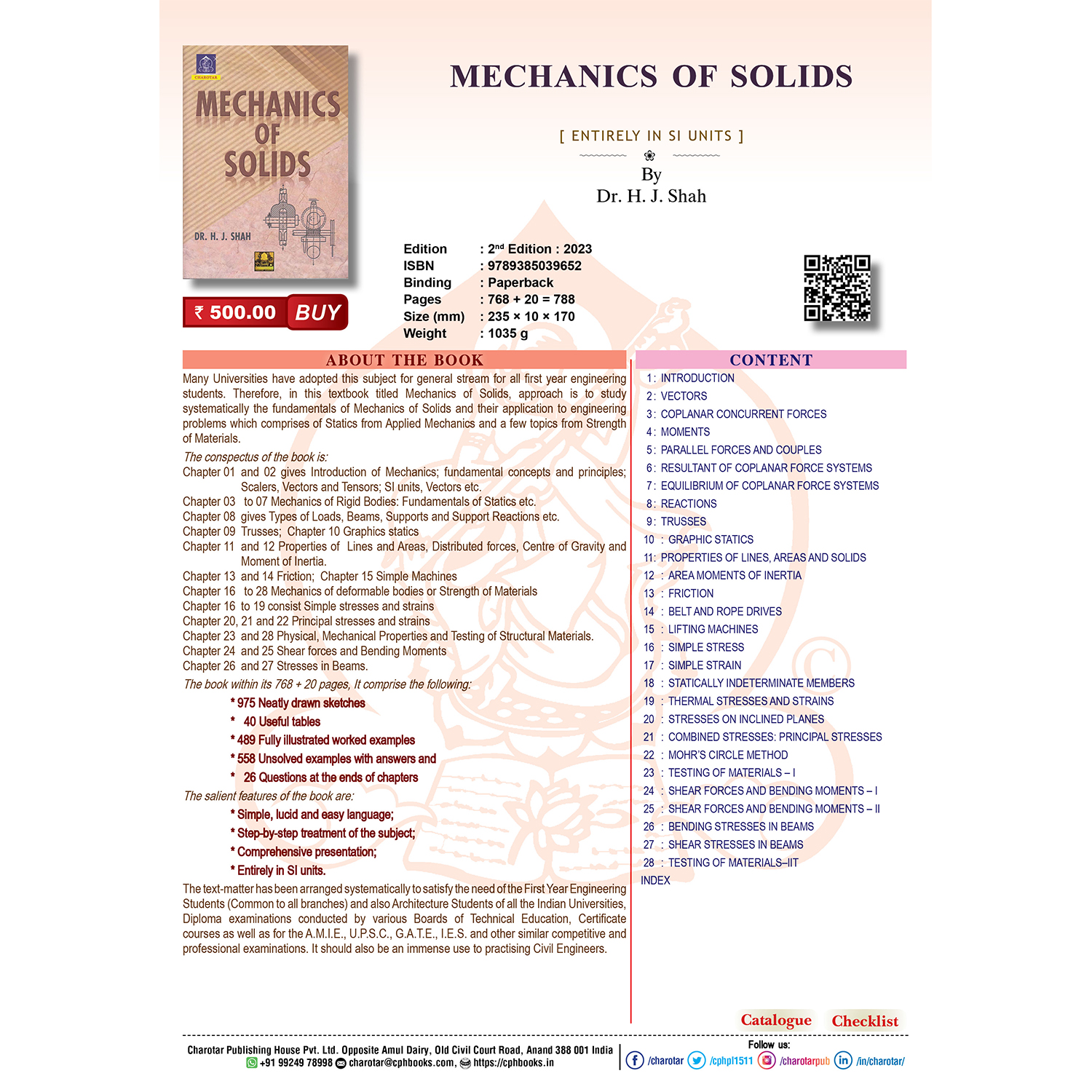
By Dr. H. J. Shah
2nd Edition 2023
ISBN : 9789385039652
Binding : Paperback
Pages : 768 + 20 = 788
Size (mm) : 240 × 33 × 170
Weight : 1035 g
Description
Many Universities have adopted this subject for general stream for all first year engineering students. Therefore, in this textbook titled Mechanics of Solids, approach is to study systematically the fundamentals of Mechanics of Solids and their application to engineering problems which comprises of Statics from Applied Mechanics and a few topics from Strength of Materials.
The conspectus of the book is:
Chapter 01 and 02 gives Introduction of Mechanics; fundamental concepts and principles; Scalers, Vectors and Tensors; SI units, Vectors etc.
Chapter 03 to 07 Mechanics of Rigid Bodies: Fundamentals of Statics etc.
Chapter 08 gives Types of Loads, Beams, Supports and Support Reactions etc.
Chapter 09 Trusses; Chapter 10 Graphics statics
Chapter 11 and 12 Properties of Lines and Areas, Distributed forces, Centre of Gravity and Moment of Inertia.
Chapter 13 and 14 Friction; Chapter 15 Simple Machines
Chapter 16 to 28 Mechanics of deformable bodies or Strength of Materials
Chapter 16 to 19 consist Simple stresses and strains
Chapter 20, 21 and 22 Principal stresses and strains
Chapter 23 and 28 Physical, Mechanical Properties and Testing of Structural Materials.
Chapter 24 and 25 Shear forces and Bending Moments
Chapter 26 and 27 Stresses in Beams.
The book within its 768 + 20 pages, It comprise the following:
* 975 Neatly drawn sketches
* 40 Useful tables
* 489 Fully illustrated worked examples
* 558 Unsolved examples with answers and
* 26 Questions at the ends of chapters
The salient features of the book are:
* Simple, lucid and easy language
* Step-by-step treatment of the subject
* Comprehensive presentation
* Entirely in SI units.
The text-matter has been arranged systematically to satisfy the need of the First Year Engineering Students (Common to all branches) and also Architecture Students of all the Indian Universities, Diploma examinations conducted by various Boards of Technical Education, Certificate courses as well as for the A.M.I.E., U.P.S.C., G.A.T.E., I.E.S. and other similar competitive and professional examinations. It should also be an immense use to practising Civil Engineers.
Additional information
| Author Name | |
|---|---|
| Book Edition | |
| ISBN | |
| Book Binding | |
| Pages | |
| Size | |
| Weight | |
| Old ISBN |
Content
1 : INTRODUCTION
2 : VECTORS
3 : COPLANAR CONCURRENT FORCES
4 : MOMENTS
5 : PARALLEL FORCES AND COUPLES
6 : RESULTANT OF COPLANAR FORCE SYSTEMS
7 : EQUILIBRIUM OF COPLANAR FORCE SYSTEMS
8 : REACTIONS
9 : TRUSSES
10 : GRAPHIC STATICS
11: PROPERTIES OF LINES, AREAS AND SOLIDS
12 : AREA MOMENTS OF INERTIA
13 : FRICTION
14 : BELT AND ROPE DRIVES
15 : LIFTING MACHINES
16 : SIMPLE STRESS
17 : SIMPLE STRAIN
18 : STATICALLY INDETERMINATE MEMBERS
19 : THERMAL STRESSES AND STRAINS
20 : STRESSES ON INCLINED PLANES
21 : COMBINED STRESSES: PRINCIPAL STRESSES
22 : MOHR’S CIRCLE METHOD
23 : TESTING OF MATERIALS – I
24 : SHEAR FORCES AND BENDING MOMENTS – I
25 : SHEAR FORCES AND BENDING MOMENTS – II
26 : BENDING STRESSES IN BEAMS
27 : SHEAR STRESSES IN BEAMS
28 : TESTING OF MATERIALS–IIT
INDEX
Details Content
Chapter 1 INTRODUCTION
1-1. Mechanics
1-2. Fundamental concepts
1-3. Scalars, vectors and tensors
1-4. Fundamental principles
1-5. System of units: SI units
BASIC SI UNITS
1-6. Using SI units
Questions I
Chapter 2 VECTORS
2-1. Vectors
2-2. Basic operations with vectors
2-3. Components, unit vectors and position vector
2-4. Vector algebra: Dot product
2-5. Vector algebra: Cross product
2-6. Triple product of vectors
Examples II
Chapter 3 COPLANAR CONCURRENT FORCES
3-1. Forces and force systems
3-2. Principle of transmissibility
3-3. Resultant of a force system
3-4. Resultant of two coplanar concurrent forces
3-5. Resultant of several coplanar forces acting at a point: Law of
polygon of forces
3-6. Resolution of a force
3-7. Resultant of a coplanar concurrent force system: Resolution
method
Examples III
Chapter 4 MOMENTS
4-1. Moment of a force
4-2. Principle of moments: Varignon’s theorem
4-3. Coplanar applications
4-4. Levers
4-5. A simple pulley
Examples IV
Chapter 5 PARALLEL FORCES AND COUPLES
5-1. Parallel force system
5-2. Couples
5-3. Equivalent couples
5-4. Addition of couples
5-5. Operations with couples
5-6. Equivalent systems of forces
5-7. Equipollent systems of vectors
Examples V
Chapter 6 RESULTANT OF COPLANAR FORCE SYSTEMS
6-1. Introduction
6-2. Resultant of parallel force system
6-3. Centre of parallel forces
6-4. Resultant of a general coplanar force system
6-5. Concentrated and distributed loads
Examples VI
Chapter 7 EQUILIBRIUM OF COPLANAR FORCE SYSTEMS
7-1. Equilibrium
EQUILIBRIUM OF A PARTICLE
7-2. Equilibrium of a particle
7-3. Resultant and equilibrant
7-4. Principle of action and reaction
7-5. Free body and free body diagram
7-6. Tensions of strings
7-7. Equilibrium of three forces acting on a particle: Lami’s theorem
7-8. Equilibrium of a particle under three forces acting on it
7-9. External and internal forces
7-11. Connected bodies
EQUILIBRIUM OF A RIGID BODY
7-12. Equilibrium of a rigid body
7-13. Conditions of equilibrium for a system of coplanar forces
acting on a body
7-14. Types of supports
7-15. Solution of problems
Examples VII
Chapter 8 REACTIONS
8-1. Axial and transverse forces
8-2. Structural members
8-3. Types of beams
8-4. Reactions by proportions
8-5. Reactions by equations of statics: Principle of super-position
8-6. Determinate and indeterminate beams/structures
Examples VIII
Chapter 9 TRUSSES
9-1. Engineering applications of connected bodies
TRUSSES
9-2. Introductory
9-3. Assumptions made in the analysis of a truss
9-4. Truss notations
9-5. Common types of trusses
9-6. Analysis of a truss
9-7. Method of joints
9-8. Method of sections
9-9. Determinateness of a truss
9-10. Truss with two hinges
Examples IX
Chapter 10 GRAPHIC STATICS
10-1. Introductory
10-2. Basic concepts
10-3. Conditions of equilibrium of a point
10-4. Three force equilibrium of coplanar, non-concurrent, non-parallel
forces
10-5. Resultant of non-concurrent, non-parallel forces: Funicular
polygon
10-6. Resultant of parallel forces
10-7. Parallel forces: Centroid problems
10-8. Graphical conditions of equilibrium
10-9. Reactions of beams and trusses
10-10. Graphical methods applied to trusses
10-11. Force diagrams for individual joints of a truss
10-12. The Maxwell diagram
10-13. Method of substitution
10-14. Truss with two hinges with inclined loads
Examples X
Chapter 11 PROPERTIES OF LINES, AREAS AND SOLIDS
11-1. Introductory
11-2. Centre of gravity
11-3. Centre of mass
11-4. First moment of an element of line and area
11-5. First moment of a line segment and a finite area
11-6. Centroids of lines and areas
11-7. Centroids of symmetrical lines and areas
11-8. Centroids by integration
11-9. Summary of centroids of common figures
11-10. Centroids of composite areas
11-11. Theorems of Pappus—Guldinus
11-12. Centroid of volumes
Examples XI
Chapter 12 AREA MOMENTS OF INERTIA
12-1. Introduction
12-2. Definitions
12-3. Radius of gyration
12-4. Parallel axis theorem
12-5. Moment of inertia by integration
12-6. Moment of inertia of composite areas
12-7. Product of inertia
Examples XII
Chapter 13 FRICTION
13-1. Introduction
13-2. Types of friction
13-3. Characteristics of dry friction
13-4. Angle of friction: Cone of friction
13-5. Angle of repose
13-6. Types of problems
13-7. Equilibrium on a rough inclined plane
APPLICATIONS OF FRICTION
13-8. The wedge
13-9. The screw
13-10. Screw-jack
13-11. Journal bearings, axle friction
13-12. Thrust bearings: Disc friction
13-13. Thrust bearing: Uniform wear
13-14. Friction plate clutches
13-15. Rolling resistance
Examples XIII
Chapter 14 BELT AND ROPE DRIVES
14-1. Belt drive
14-2. Velocity ratio
14-3. Compound belt drive
14-4. Length of belt: Open drive
14-5. Length of belt: Crossed drive
14-6. Transmission of power
14-7. Centrifugal tension
14-8. Optimum speed for maximum power
14-9. Rope drive
Examples XIV
Chapter 15 LIFTING MACHINES
15-1. Definitions
15-2. Basic machines
15-3. Differential wheel and axle
15-4. Differential pulley-block
15-5. Differential screw
15-6. Pulley-blocks
15-7. Lifting machines with toothed gearing
15-8. Worm gearing
15-9. Worm geared screw jack
15-10. Worm geared pulley block
15-11. Linear law
15-12. Reversibility of a machine
15-13. Compound efficiency
Examples XV
Chapter 16 SIMPLE STRESS
16-1. Introduction to Mechanics of deformable bodies
16-2. Loading a bar
16-3. Principle of superposition
16-4. Classification of loaded bar
16-5. Gradual, sudden, impact and shock loading
16-6. Tension and compression
16-7. Resistance of an axially loaded bar
16-8. Concept of a stress
16-10. Simple stress
16-11. Design of an axially loaded member
16-12. Non-prismatic bars
16-13. Axial force diagram
16-14. Rotating rings
16-15. Shear
16-16. Shear stress
16-17. Pure shear
16-18. Bearing stress
Examples XVI
Chapter 17 SIMPLE STRAIN
17-1. Introduction
17-2. Linear strain
17-3. Shear strain
17-4. Elasticity
17-5. Hooke’s law
17-6. Axial and shear deformations
17-7. Bars of varying section
17-8. Bars of uniformly varying cross-section
17-9. A bar subjected to self-weight
17-10. Bar of uniform strength
17-11. Bars subjected to uniformly varying loads
17-12. Pin-jointed determinate frames
17-13. Lateral strain: Poisson’s ratio
17-14. Biaxial and triaxial deformations
Examples XVII
Chapter 18 STATICALLY INDETERMINATE MEMBERS
18-1. Introduction
18-2. Composite bars
18-3. Equivalent modulus of a composite bar
18-4. Pin-jointed bars
18-5. Stresses due to lack of fit
Examples XVIII
Chapter 19 THERMAL STRESSES AND STRAINS
19-1. Introduction
19-2. General
19-3. Coefficient of linear expansion
19-4. Stresses due to changes of temperature
19-5. Compound bar
19-6. Composite bar
19-7. Bars of uniformly varying cross-section
19-8. Shrinking-on
Examples XIX
Chapter 20 STRESSES ON INCLINED PLANES
20-1. Introduction
20-2. Stresses on inclined plane of a bar under tension or compression
20-3. State of pure shear: Stresses on inclined planes
20-4. Linear strain of the diagonal BD
20-5. Relation between the Moduli of Elasticity and Rigidity for a
given material
20-6. Bulk Modulus
20-7. Relation between three elastic constants
Examples XX
Chapter 21 COMBINED STRESSES: PRINCIPAL STRESSES
21-1. Introduction
21-2. Stress components
21-3. Element subjected to general plane stress system
21-4. Principal planes and principal stresses
21-5. Planes carrying maximum shear stress
21-6. Element subjected to principal stresses
Examples XXI
Chapter 22 MOHR’S CIRCLE METHOD
22-1. Mohr’s circle method
Examples XXII
Chapter 23 TESTING OF MATERIALS – I
23-1. Introduction
23-2. Metals and alloys
23-3. Testing machines
Tension Tests
23-4. The complete tensile test
23-5. Stress–strain diagram
23-6. Mechanical properties of materials
23-7. Modulus of elasticity
23-8. Yield point by the offset method: Proof stress
23-9. Secant modulus
23-10. Specific modulus of elasticity
23-11. Resilience
23-12. Toughness
Compression Tests
23-13. The compression test
23-14. Compression tests on wood and concrete
23-15. Permissible stress: Factor of safety
Stress Concentration
23-16. Stress concentration
23-17. Stress concentration factor
23-18. Importance of stress concentration under different loads
23-19. Elastoplastic materials: Limit design
Examples XXIII
Chapter 24 SHEAR FORCES AND BENDING MOMENTS – I
24-1. Introductory
24-2. Types of beams
24-3. Actions on the cross-section of a beam
24-4. Sign conventions
24-5. Shear Force (S.F.) and Bending Moment (B.M.) diagrams
24-6. Cantilevers
24-7. Simply supported beams
24-8. Relation between the S.F. and the B.M. at a cross-section of
a beam
24-9. Overhanging beams
Examples XXIV
Chapter 25 SHEAR FORCES AND BENDING MOMENTS – II
25-1. Introduction
25-2. S.F. and B.M. diagrams for beams with variable loading
25-3. Beams with end couples
25-4. Beams with an intermediate couple
25-5. Supports offering pressures
25-6. Cantilever structures
25-7. Principle of superposition
25-8. Moment and loading diagrams drawn from shear diagrams
25-9. Beams subjected to inclined loads
25-11. Graphical methods
Examples XV
Chapter 26 BENDING STRESSES IN BEAMS
26-1. Simple bending
26–2. Theory of simple bending
26-3. Modulus of section or section modulus
26-4. Application of bending equation
26-5. Modulus of rupture
26-6. Beams of rectangular section
26-7. Strength of sections
26-8. Economic sections
26-9. Unsymmetrical and built-up sections
26-10. Modulus figure
26-11. Beam of uniform strength
26-12. Strain energy in flexure
26-13. Laminated springs
Examples XVI
Chapter 27 SHEAR STRESSES IN BEAMS
27-1. Resistance to shear force: shear stresses
27-2. Shear flow
27-3. Shear stresses in beams of rectangular and circular sections
27-4. Shear stresses in beams of I-section
27-5. Assumptions and limitations of the shear stresses formula
27-6. Shear stresses in built-up sections
27-7. Beam of square section with one diagonal horizontal
27-8. Design for flexure and shear
27-9. Principal stresses and Principal planes at a point in a beam
section
27-10. Curves of principal stresses
27-11. Principal stresses in an I-section
27-12. Strain-energy due to shear in a beam
Examples XVII
Chapter 28 TESTING OF MATERIALS–II
28-1. Flexure tests
28-2. Important flexure tests
28-3. Shear tests
28-4. Hardness
28-5. Brinell hardness test
28-6. Rockwell hardness test
28-7. Impact tests
28-8. Fatigue
28-9. Stress spectrum
28-10. Fatigue tests
28-11. S-N curve
28-12. Endurance limit or fatigue limit
28-13. Fatigue failure
Examples XXVIII
Questions
Index
Only logged in customers who have purchased this product may leave a review.

Reviews
There are no reviews yet.